
PLC Cơ bản
-
Th8, T4, 2024
- 0
- 3 views
- 14 minutes Read
Bộ điều khiển khả trình hay bộ điều khiển logic khả trình Programmable Logic Controller (PLC) là thiết bị điều khiển lập trình cho phép người sử dụng thực hiện linh hoạt các thuật toán điều khiển logic thông qua một ngôn ngữ lập trình. Người sử dụng có thể lập trình để thực hiện một loạt trình tự các sự kiện. Các sự kiện này được kích hoạt bởi tác nhân kích thích (còn gọi là ngõ vào) tác động vào PLC hoặc qua các tác động trễ như thời gian định kỳ.
Bài viết này giúp những người mới dùng lần đầu có thể nắm bắt tổng quan và hiểu về bộ điều khiển khả trình.
Phụ lục nội dung
CHƯƠNG 1: “Kiểm soát tuần tự” là gì?
Bộ điều khiển khả trình hay còn gọi là “Bộ điều khiển logic khả trình” hoặc”Bộ điều khiển khả trình PLC (Programmable Logic Controller), là một thiết bị điều khiển được sử dụng cho tự động hóa công nghiệp.
Từ trước đến nay, các quốc gia trên thế giới phát triển nền kinh tế của mình bằng sản xuất hoàng loạt và tiêu thụ sản phẩm.
Sản xuất hàng loạt được thực hiện bằng cách sử dụng máy công cụ.
Năng xuất của sản xuất được tăng thêm bằng cách tự động hóa các hoạt động của máy móc.
1.1: Ý nghĩa của “Tuần tự”.
Theo thuật ngữ” tuần tự” dùng để chỉ một chuỗi hoặc tứ tự các sự kiện sảy ra
Theo đó,”kiểm soát tuần tự” có thể được định nghĩa là hoạt động được điều khiển của máy theo một trình tự định trước.
Kiểm soát tuần tự đước sử dụng rộng rãi trong cuộc sống hàng ngày của chúng ta.
Máy bán hang tự động và máy giặt chỉ là một vài ví dụ về máy móc hoạt động theo nguyên tắc kiểm soát tuần tự.

1.2: Ví dụ ứng dụng của Kiểm soát tuần tự.
Kiểm soát tuần tự được sử dụng trong nhiều ngành nghề khác nhau:

1.3: Thiết bị cần thiết cho Kiểm soát tuần tự.

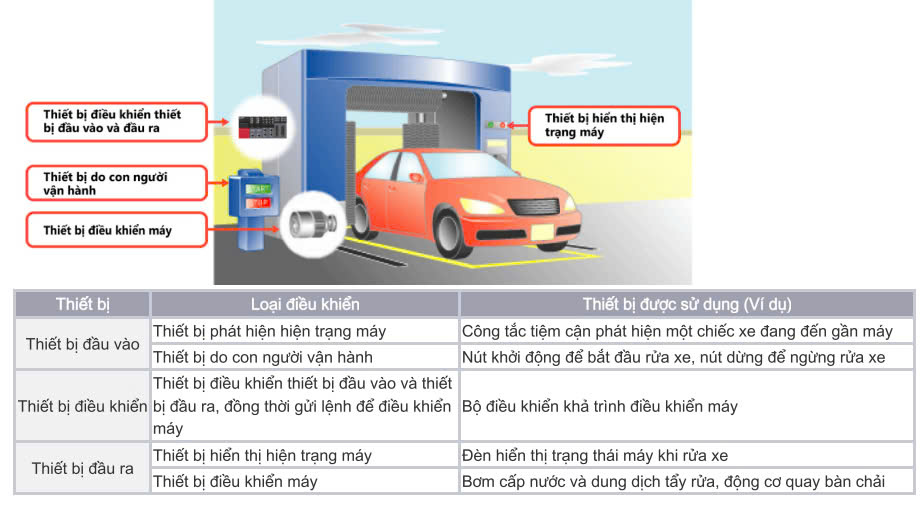
Bây giờ chúng ta sẽ xem các ví dụ cụ thể về thiết bị cần thiết để kiểm soát tuần tự trong máy rửa xe.
1.4:Kiểm soát tuần tự cơ bản (kiểm soát tuần tự)
Kiểm soát tuần tự cơ bản đạt được bằng cách tích hợp các điều khiển sau vào hoạt động của máy.
- Kiểm soát tuần tự
- Điều khiển có điều kiện
- Giới hạn thời gian
- Điều khiển đếm
(1) Điều khiển tuần tự.
Vận hành máy tính từ bước này sang bước khác theo trình tự định sẵn. Loại điều khiển này được gọi là “điều khiển tuần tự”. Trong ví dụ về máy rửa xe, cùng một hoạt động được lặp lại tự động với số lần bất kì theo trình tự định trước.
(2) Điều khiển có điều kiện.
Các hoạt động đến mục tiêu điều khiển được xác định bởi một điều kiện. Loại điều khiển này được gọi là “điều khiển có điều kiện”. Trong ví dụ về máy rửa xe, quy trình rửa xe chỉ bắt đầu sau khi nhập số tiền thanh toán.
(3) Kiểm soát thời gian.
Các lệnh hoạt động đến mục tiêu điều khiển được xác định bởi thời gian cài sẵn và căn giờ. Loại điều khiển này được gọi là “điều khiển hẹn giờ”.
Cần chức năng hẹn giờ để kiểm soát thời gian.
(4) Điều khiển đếm
Các lệnh hoạt động cho mục tiêu điều khiển được xác định bằng số lượng, chẳng hạn như số lượng sản phẩm và số lượng hoạt động của máy. Loại điều khiển này được gọi là “điều khiển đếm”.
Cần chức năng đếm để điều khiển đếm.
CHƯƠNG 2:”Bộ điều khiển khả trình” là gì?
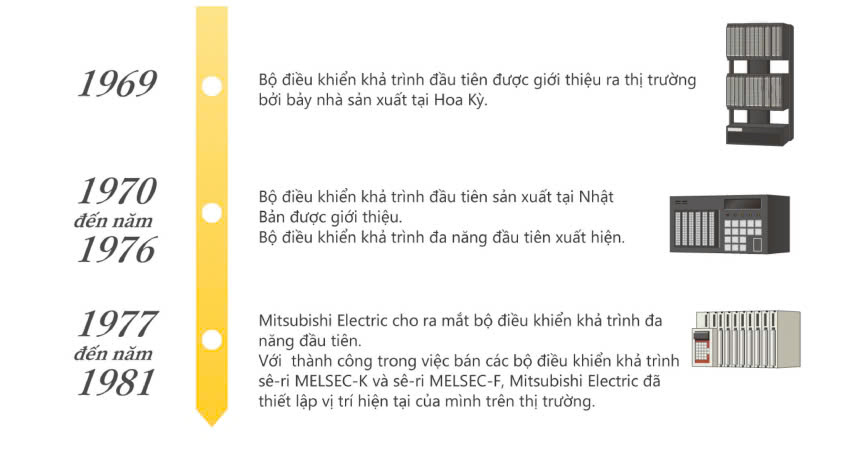
2.1: Lịch sử.
Kiểm soát tuần tự sử dụng rơ le tiếp điểm chiếm ưu thế trong những năm 1960. Tuy nhiên, loại kiểm soát tuần tự này rất tốn thời gian. Việc thực hiện thay đổi trong mạch điều khiển bất cứ khi nào thiết bị, dụng cụ hoặc hệ thống sản xuất được thay thế hoặc cập nhật là rất phức tạp.
Vào thời điểm đó, một nhà sản xuất ô tô ở Hoa Kỳ đã đưa ra các yêu cầu đối với hệ thống kiểm soát tuần tự mới để thay thế hệ thống sử dụng rơ le tiếp điểm. Kết quả là bộ điều khiển khả trình đầu tiên được phát triển là bộ điều khiển đáp ứng các yêu cầu đó.
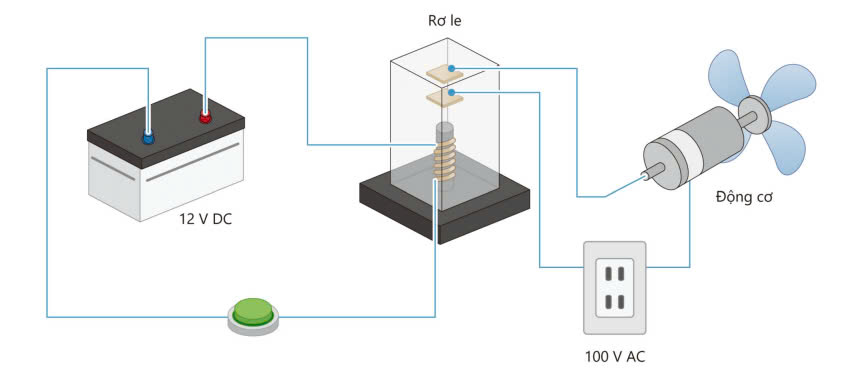
2.2:Rơ le
Rơ le là một công tắc điện được vận hành bởi một tín hiệu tương đối nhỏ có thể bật hoặc tắt dòng điện lớn hơn nhiều. Mỗi rơ le có một nam châm điện bên trong. Khi dòng điện chạy trong mạch đầu vào, nó sẽ kích hoạt nam châm điện. Nam châm điện được kích hoạt sẽ đóng tiếp điểm, cho phép dòng điện lớn hơn chạy qua mạch đầu ra.
Sau đây là một ví dụ về sơ đồ điện. Một động cơ lớn có thể được điều khiển bằng các tín hiệu bật/tắt.
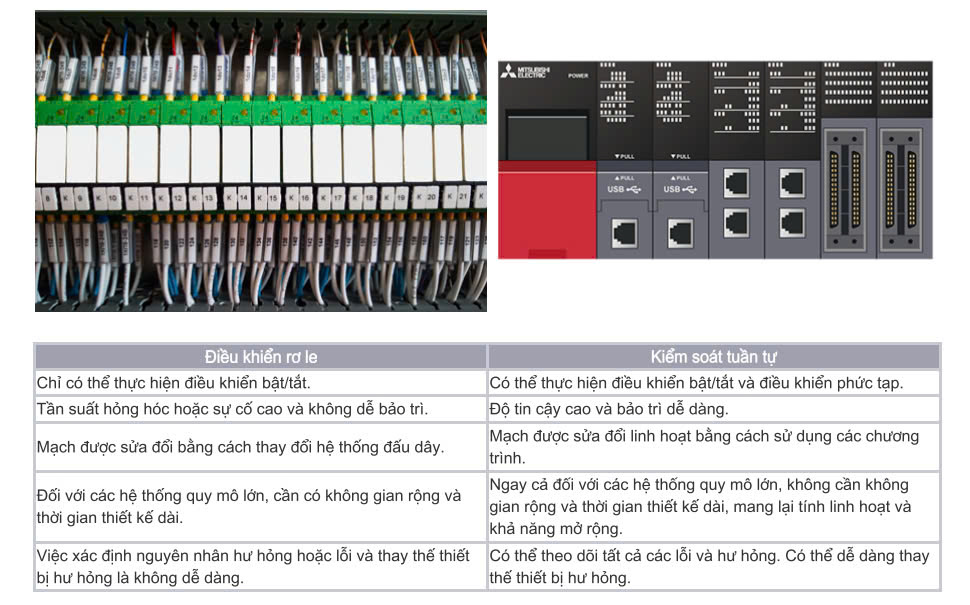
2.3: Sự khác biệt giữa điều khiển Rơ le và Kiểm soát tuần tự.
2.4: Tính năng điều khiển khả trình và máy tính cá nhân.
Cần có cả bộ điều khiển khả trình và máy tính cá nhân để thực hiện điều khiển phức tạp. Tuy nhiên, chúng được sử dụng cho các mục đích khác nhau.

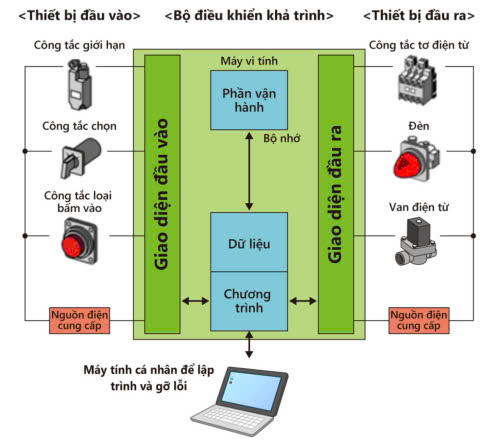
2.5: Cấu tạo của Bộ điều khiển khả trình
Các thiết bị được kết nối với phía đầu vào của bộ điều khiển khả trình là “thiết bị đầu vào” và các thiết bị được kết nối với phía
đầu ra của bộ điều khiển khả trình là “thiết bị đầu ra”.
Các thiết bị này được kết nối vật lý với giao diện đầu vào đầu ra của bộ điều khiển khả trình thông qua dây dẫn.
Tín hiệu bật/tắt (khởi động/ngừng hoạt động) của thiết bị đầu vào được kết nối với thiết bị đầu ra nào được xác định bởi một
chương trình. Các chương trình được tạo bằng cách sử dụng công cụ kỹ thuật và được ghi vào bộ điều khiển khả trình (hay
chính xác hơn là vào mô đun CPU).
2.6: Kiến thức cơ bản về tiếp điểm.
Chúng ta hãy tìm hiểu về các tiếp điểm thường được sử dụng trong kiểm soát tuần tự.
Vai trò của tiếp điểm là bật rơ le hoặc công tắc bật và tắt (để cho phép hoặc chặn dòng điện). Ví dụ, một tiếp điểm được sử
dụng trong công tắc nguồn.
(1) Tiếp điểm thường mở
Đây là một tiếp điểm mở ở vị trí mặc định của nó. Khi được kích hoạt, tiếp điểm này sẽ đóng lại và dòng điện sẽ chạy qua.
Ví dụ: Nút khởi động

(2) Tiếp điểm thường đóng
Đây là một tiếp điểm đóng ở vị trí mặc định của nó. Khi được kích hoạt, tiếp điểm này sẽ mở ra và sẽ không có dòng điện chạy
qua.
Ví dụ: Nút ngừng khẩn cấp


2.7: Vận hành điều khiển khả trình
Sau đây là luồng tín hiệu sử dụng cho hoạt động.

Trạng thái của thiết bị đầu vào được đưa vào rơ le đầu vào của bộ điều khiển khả trình dưới dạng tín hiệu bật/tắt điện. Bộ điều khiển khả trình thực hiện chương trình bằng cách sử dụng tín hiệu đầu vào nhận được và xuất kết quả hoạt động (tín hiệu bật/tắt điện) đến thiết bị đầu ra thông qua một tiếp điểm dành cho đầu ra bên ngoài.
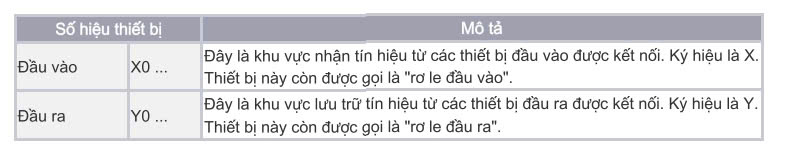
Sau đây là các thiết bị điển hình trong bộ điều khiển khả trình.
Mỗi thiết bị được mô tả bằng một ký hiệu và một con số.
2.8: Trương trình.
Bên trong bộ điều khiển khả trình, kiểm soát tuần tự được thực hiện dựa trên các chương trình, chẳng hạn như chương trình
bên dưới.
Chương trình sau đây được viết bằng ngôn ngữ biểu đồ ladder. Ngôn ngữ này được gọi là biểu đồ “bậc thang” vì chúng giống
như một cái thang.
• Chương trình bật đèn
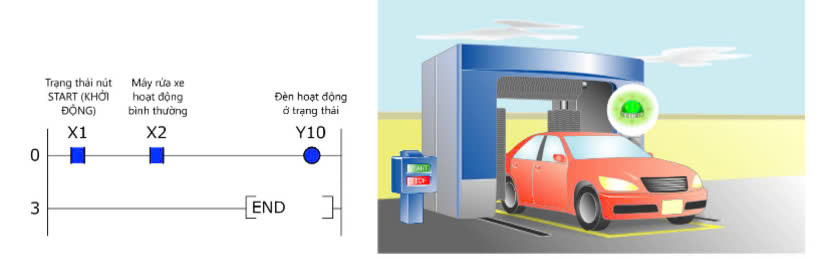
Mỗi đơn vị vận hành lệnh trong chương trình được gọi là một “bước” và một số, được gọi là “số bước”, được gán cho mỗi bước.
Mô đun CPU thực hiện các lệnh tuần tự bắt đầu từ số bước 0. Sau khi lệnh END (KẾT THÚC) được thực hiện, hoạt động của
chương trình quay trở lại số bước 0 và lặp lại lần nữa. Đây được gọi là “vận hành theo chu kỳ”. Thời gian cần thiết để thực hiện
một chu kỳ tuần tự được gọi là “thời gian quét”.
Như minh họa trong ví dụ chương trình trên, khi hai công tắc X1 và X2 được kết nối nối tiếp, hoạt động “AND” (VÀ) được thực
hiện.
Lệnh AND (VÀ) là một trong những lệnh tuần tự cơ bản nhất.
Nguồn: Mitsubishielectric.com


